So not long after completing our first lockdown robot, we found we had enough spares to throw yet another bot together. So we did. This is A.R.T.I-2 and she was completed, start to finish (and working), in a single day.
A.R.T.I-2 is yet another obstacle avoidance robot with similar functionality to A.R.T.I-2, in that she uses her ultrasonic sensor mounted on an SG90 servo to avoid obstacles by stopping when it senses an object, reversing slightly and then stopping to look around. It then turns around and goes in another direction; ad infinitum, or at least until the battery drains enough to stop one of the components working.
Theoretically this robot just running these functions could enter a room and then slowly, through its maneuvering, find its way back out again. It’s basic, but not entirely useless.
So we wondered what we could add to a robot in terms of sensors that would be useful when sending a robot into a room by itself. Presumably as robots are often utilitarian and tend to be used where humans cannot readily venture, we should try and use a sensor to detect something in a room that might prevent a human from entering safely.
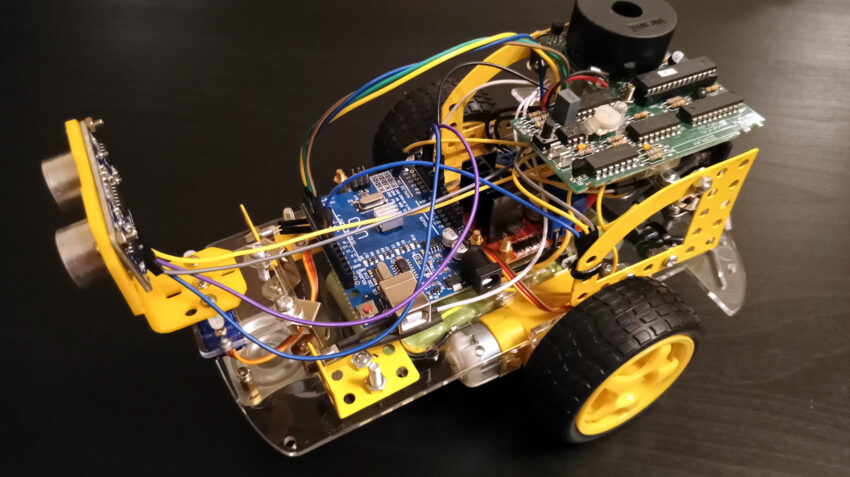
So A.R.T.I-2 now also detects carbon monoxide. It’s a very crude system, with a carbon monoxide detector simply being strapped to the top of the robot, but it does sound a rather loud alarm should carbon monoxide be detected. It runs on the same power supply as the robot itself.
A.R.T.I-2 is more than effective enough to be sent into a room with suspected carbon monoxide, then navigate itself around that room and to signal if it finds any. Unfortunately however, it’s not very specific. It cannot tell us where the source of noxious gas might be, or what the levels are. That being said, we did just throw her together from spares.
Ultimately she’s another home-education project aiming to show not just how robots work and function technically, but how utility can be applied to them, and why certain robots often specialise in their abilities.
This robot is wired from a 9.6v battery into the L298n Dual H Bridge motor driver, which then provides the regulated 5v out to the arduino, the SG90 servo and the HC-SR04 ultrasonic sensor. The arduino using the power from the L298n, then sends signals back to it from the code it’s running, to control the motors.
Because the battery for this robot is superior, and because the weight distribution is unequal (bias is towards the rear), A.R.T.I-2 pulls wheelies on every forward acceleration. Which is fun.
There will be a page on this website specifically for this robot, where wiring diagrams and the code can be found HERE
Stats:
Name: A.R.T.I 2
Utility: Carbon Monoxide Detection / Education
Build Purpose: Home Education
Weight (total): 800g
Wheel Width: 2.5cm
Whole Track Width: 15.6cm
Motor Reduction Ratio: 48:1
Microcontrollers: 1 x Arduino Uno
Motor Driver: 1 x L298n Dual H Bridge
Servo: 1 x SG90
Sensor 1: 1 x HC-SR04 Ultrasonic
Sensor 2: Self Contained Carbon Monoxide Detector
Switches: 1 x 12v anti-vandal switch in black.
LEDs: 4 x in parallel (100ohm resistors)
Power to Board 1: 5v regulated
Power to Motor Driver: 9.6v Ni-MH 2300mAh








